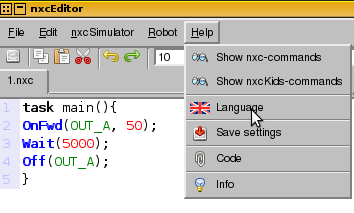
Le langage de programmation utilisé est le langage NXC.
ATTENTION : en plus des commandes standards du langage NXC, certaines commandes additionnelles sont disponibles spécifiquement pour le simulateur NxcSImulator :
Ces commandes sont :
Pour lever le crayon : PenUp();
Pour abaisser le crayon : PenDown();
Utilisez ces commandes en écrivant :
PenuP();
PenDown();
ATTENTION : certaines commandes du langage NXC ne sont pas disponibles avec le simulateur :
Les fonctions de dessin suivantes ne sont pas disponibles :
PointOut, RectOut, LineOut, CircleOut
ATTENTION : si vous désirez télécharger vos programmes dans un robot NXT réel, veuillez utiliser le menu ROBOT + FILE MANAGER
Cette série d'activités vous permettront de construire et de programmer un robot NXT virtuel.
en remplaçant NomDeVotreImage.png par le nom de votre image à transférer.
Si le logiciel n'est pas installé : installez le logiciel NXC-EDITOR en tapant dans le terminal
: SOUS LUBUNTU et autres SE(OS) pour obtenir le plus récente version :
Enregistrez ce programme sous le nom aa.nxc dans le répertoire /home/cb/ en tapant la touche F3 Sélectionnez le menu nxcSimulator + Open nxcSimulator
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
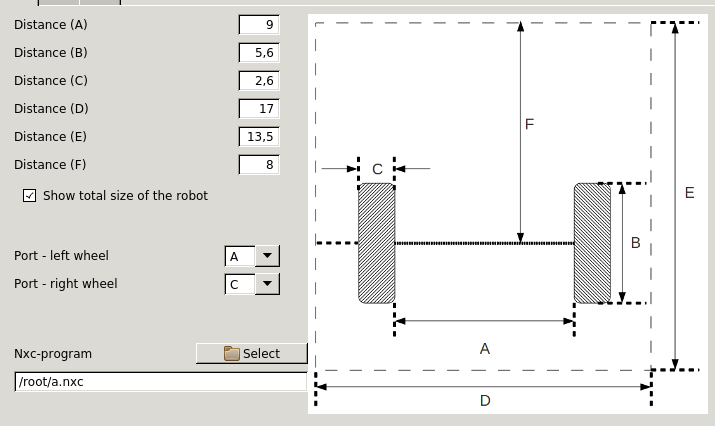
Faites fonctionner votre programme en utilisant les boutons Sélectionnez le menu Robot + Edit Robot
En utilisant les 3 onglets disponibles, ajoutez les accessoires suivants :
un moteur branché dans le port A
un moteur branché dans le port C
un détecteur de toucher branché dans le port 1
un détecteur de son branché dans le port 2
un détecteur de lumière branché dans le port 3
un détecteur ultra-son branché dans le port 4
sélectionnez une image de votre choix pour votre robot
Effectuez une capture-écran-image de chacun des onglets et nommez ces images nxce1.png, nxce2.png et nxce3.png
Cliquez le bouton OK et enregistrez votre robot sous le nom aa.robot en utilisant le menu ROBOT + SAVE ROBOT
Cliquez le bouton OK afin de voir les modifications
Titre du défi B 5 (points):
L'aller-retour
Construisez un ROBOT ayant deux moteurs A et C en utilisant les menus :
- nxcSimulator + Open nxcSimulator
et
Robot + Edit Robot
Depuis la fenêtre "nxceditor", programmez le robot afin qu'à partir du centre, le robot se déplace en ligne droite jusqu'au bord de la fenêtre et qu'il recule ensuite jusqu'au bord opposé de la fenêtre en utilisant soit les commandes : RotateMotor ou OnFwd et OnRev.
Vous aurez besoin de la structure suivante
task main()
{
}
et des commandes suivantes :
RotateMotor(OUT_AC,100,100);
ou
OnFwd(OUT_AC,2000);
Wait(2000);
et
OnRev(OUT_AC,2000);
Wait(2000);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom bb.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Faites fonctionner votre programme en utilisant les boutons Effectuez une capture-écran-image nommée bb.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi C 5 (points):
Les formes géométriques
Construisez un ROBOT ayant deux moteurs A et C et ayant le traceur (crayon) placé sur la roue droite (Menu NXCSIMULATOR et OPEN NXCSIMULATOR et le Menu Robot + Edit Robot et l'onglet 3 )
Dans la fenêtre nxcsimulator, utilisez le menu FILE + NEW et programmez le robot, en utilisant les boucles de répétitions (commande repeat) , afin qu'il trace :
-un carré
- un triangle
-un cercle
en utilisant une ligne de couleur rouge sur un fond noir.
IMPORTANT :
Utilisez les commandes suivantes PenUp(); et PenDown(); afin de déplacer le robot sans tracer et déplacer le robot pour tracer.
Pour utiliser les commandes PenUp(); et PenDown(); dans votre programme principal, vous devez insérer (COPIER - COLLER) ces fonctions AVANT votre programme principal :
sub PenUp(){}
sub PenDown(){}
Vous aurez besoin des structures suivantes :
sub PenUp(){}
sub PenDown(){}
repeat(4){
}
task main()
{
}
et des commandes suivantes :
PenDown();
RotateMotor(OUT_AC,100,100);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom cc.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Faites fonctionner votre programme en utilisant les boutons Afin de tracer une ligne avec le robot, vous devez :
B) utilisez le menu Robot + Edit Robot + Onglet no 3 + Marks + Dotted Line + sélectionnez la couleur et sélectionnez Wheel Right Effectuez une capture-écran-image nommée cc.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi D 5 (points):
Le chiffre 8
Construisez un ROBOT ayant deux moteurs A et C et un crayon fixé au centre du robot.
Programmez le robot afin qu'il trace le chiffre 8 en utilisant une ligne de couleur verte sur un fond noir
Vous aurez besoin des structures suivantes
sub PenUp(){}
sub PenDown(){}
task main()
{
}
et des commandes suivantes:
PenDown();
PenUp();
RotateMotor(OUT_AC,100,100);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom dd.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Faites fonctionner votre programme en utilisant les boutons Afin de tracer une ligne avec le robot, vous devez :
B) utilisez le menu Robot + Edit Robot + Onglet no 3 + Marks + Dotted Lline + sélectionnez la couleur
Effectuez une capture-écran-image nommée dd.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
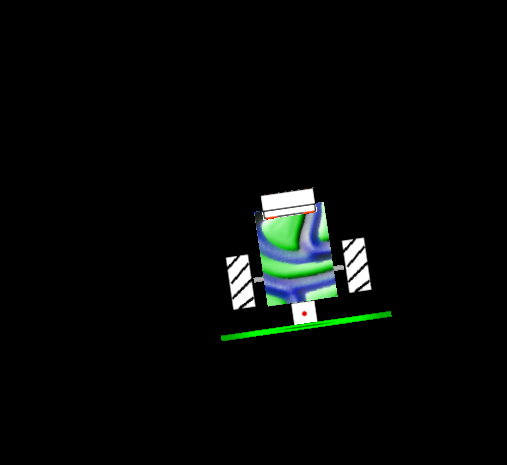
Titre du défi E (5 points):
Le robot suiveur de ligne
Construisez un ROBOT ayant deux moteurs A et C et un capteur de lumière branché dans le port 3
Programmez le robot afin qu'il suive la ligne noire
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom ee.nxc en tapant la touche F3
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true){
}
if( ) {
}
else
{
}
et des commandes suivantes :
SetSensorLight(IN_3);
Sensor(IN_3)
RotateMotor(OUT_AC,100,100);
Voici le pseudo-code qui pourrait vous aider
la tâche principale est
je branche le capteur de lumière dans le port no.
répéter pour toujours
si la valeur du capteur de lumière est égale à 0
faire tourner le moteur A légèrement
sinon
faire tourner le moteur C légèrement
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Réglez l'image en arrière-plan à "LIGNE" en utilisant le menu
BACKGROUND + SELECT BACKGROUND et en choisissant l'image LINES
Faites fonctionner votre programme en utilisant les boutons Effectuez une capture-écran-image nommée ee.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi F (5 points) :
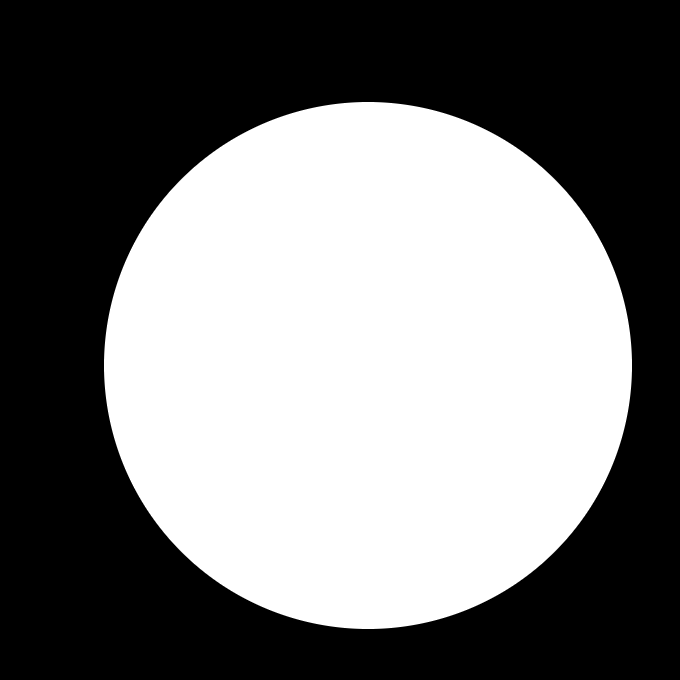
Le robot à l'intérieur du cercle blanc
Construisez un ROBOT ayant deux moteurs A et C et un capteur de lumière branché dans le port 3
Créez avec GIMP une image de dimension 680 pixels x 680 pixels contenant un cercle blanc sur un fond noir. (tutoriel vidéo)
Ou utilisez cette image (clic droit + enregistrer cette image sous...) Exportez ou enregistrez cette image sous le nom ff.png
Utilisez le menu NXCSIMULATOR + OPEN NXCSIMULATOR
Réglez l'image en arrière-plan en sélectionnant votre image gg.png en utilisant les menus
BACKGROUND + CREATE BACKGROUND + Select + Start + OK
et
BACKGROUND + SELECT BACKGROUND
Programmez le robot afin qu'il se déplace dans toutes les directions à l'intérieur du cercle blanc sans jamais quitter le cercle blanc
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true){
}
if( ) {
}
else
{
}
et des commandes suivantes :
int NombreAleatoire;
NombreAleatoire = Random(1000);
SetSensorLight(IN_3);
Sensor(IN_3)
RotateMotor(OUT_AC,100,100);
Voici le pseudo-code qui pourrait vous aider
la tâche principale est
je branche le capteur de lumière dans le port no.
je crée la variable nommée NombreAleatoire de type integer
répéter pour toujours
si la valeur du capteur de lumière est égale à 0
assigner une valeur aléatoire à la variable NombreAleatoire
faire reculer le robot légèrement
faire tourner le robot en utilisant la valeur de la variable aléatoire
sinon
faire avancer le robot légèrement
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom ff.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Réglez l'image en arrière-plan en sélectionnant votre image ff.png en utilisant les menus
BACKGROUND + CREATE BACKGROUND + Select + Start + OK
et
BACKGROUND + SELECT BACKGROUND
Faites fonctionner votre programme en utilisant les boutons Effectuez une capture-écran-image nommée ffc.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi G (5 points) :
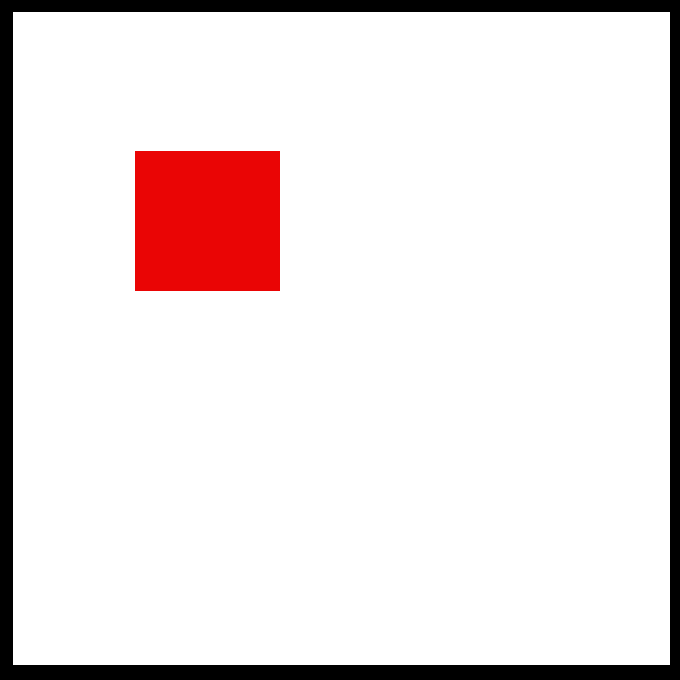
Les feux de circulation
Construisez un ROBOT ayant deux moteurs A et C et un détecteur de lumière branché dans le port 3
Créez avec GIMP une image de dimension 680 pixels x 680 pixels contenant un petit carré rouge sur un fond blanc ayant une bordure noire. (tutoriel vidéo)
ou utilisez cette image Utilisez le menu FICHIER + EXPORTER afin d'exporter cette image sous le nom gg.png
Réglez l'image en arrière-plan en sélectionnant votre image en utilisant les menus
BACKGROUND + CREATE BACKGROUND + Select + Start + OK
et
BACKGROUND + SELECT BACKGROUND
Programmez le robot afin qu'il se déplace dans la zone de jeu.
Si (commande if) le robot frappe les murs de côté (bordure noire : couleur = 0) (commandes SetSensorLight(IN_3); et Sensor(IN_3) ), il doit reculer (commandes RotateMotor ou OnFwd) de x (valeur de votre choix) et tourner de y (valeur de votre choix) (commandes RotateMotor ou OnFwd) jusqu'à ce qu'il détecte le carré rouge (couleur =32) ( commandes if et Sensor(IN_3) ) sur lequel le robot doit s'arrêter (commande Off).
Vous aurez besoin des structures suivantes
task main()
{
}
while(true){
}
if( ) {
}
et des commandes suivantes :
SetSensorLight(IN_3);
Sensor(IN_3)
Off(OUT_AC);
RotateMotor(OUT_AC,100,100);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom gg.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée ggc.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi H (5 points) :
Le capteur de contact comme volant
Construisez un ROBOT ayant deux moteurs A et C et un détecteur de contact avant branché dans le port 1
Programmez le robot afin qu'il se déplace vers la gauche lorsque le capteur de contact avant n'est pas activé et qu'il se déplace vers la droite lorsque le capteur de contact avant est activé.
Vous aurez besoin des structures suivantes
task main()
{
}
while(true){
}
if( ) {
}
else
{
}
et des commandes suivantes :
SetSensorTouch(IN_1);
Sensor(IN_1)
Off(OUT_AC);
RotateMotor(OUT_AC,100,100);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom hh.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Utilisez le menu Sensor + sensor direct (touche F10) afin de contrôler votre robot avec ce capteur
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Titre du défi i (5 points) :
Utiliser les boutons du robot
ATTENTION : ne pas utiliser les paramètres BTNRIGHT , BTNLEFT, BTNCENTER
veuillez utiliser :
1 pour BTNRIGHT
2 pour BTNLEFT
3 pour BTNCENTER
Construisez un ROBOT ayant deux moteurs A et C
Programmez le robot afin :
1) qu'il se déplace vers l'avant lorsque le bouton droit de la brique est activé
2) qu'il tourne à droite lorsque le bouton gauche de la brique est activé
Vous aurez besoin des des structures suivantes
task main()
{
}
while(true){
}
if( ) {
}
else
{
}
et des commandes suivantes :
ButtonPressed(1,true)
Off(OUT_AC);
RotateMotor(OUT_AC,100,100);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom ii.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Utilisez le menu Sensor + sensor direct (touche F10) afin de contrôler votre robot avec les boutons
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Titre du défi j (5 points) :
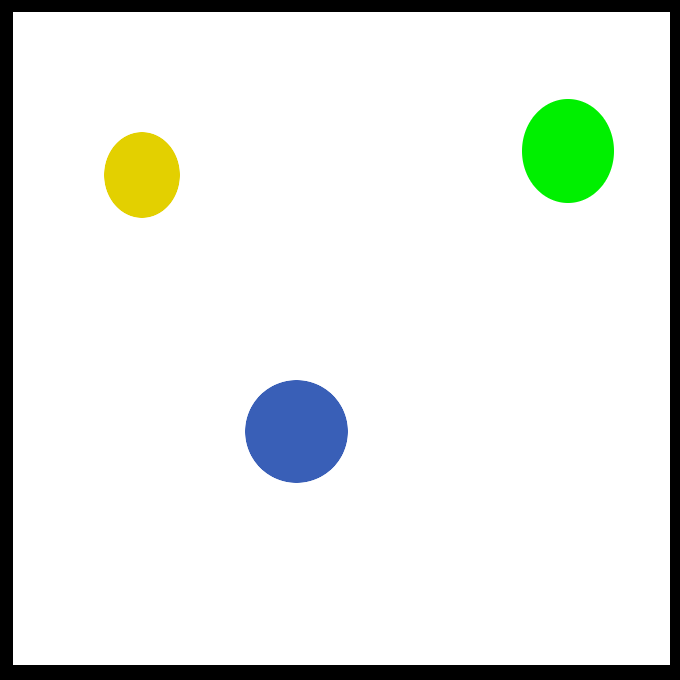
Le détecteur de couleurs
Construisez un ROBOT ayant deux moteurs A et C et deux détecteurs de toucher et un détecteur de lumière
Programmez le robot afin qu'il se déplace en utilisant les détecteurs de toucher et déplacez le robot afin que le détecteur de lumière puisse lire la couleur de chacun des cercles. Affichez à l'écran la valeur captée par le capteur de lumière pendant 1 seconde lorsque le détecteur de lumière est placé au-dessus de chacun des 3 cercles de couleur.
Utilisez cette image (clic droit + enregistrer cette image sous...)
Vous aurez besoin des des structures suivantes
task main()
{
}
while(true){
}
if( ) {
}
else
{
}
et des commandes suivantes :
SetSensorLight(IN_2);
NumOut(10,LCD_LINE2,130);
Sensor(IN_1)
RotateMotor(OUT_AC,100,100);
ClearScreen();
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom j.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Utilisez le menu Sensor + sensor direct (touche F10) afin de contrôler votre robot avec les boutons
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Notez la valeur du capteur de couleur pour chacune des couleurs
Insérez dans votre page le nom des couleurs et leurs valeurs numériques
Titre du défi K (5 points) :
Création d'une pièce de musique
Programmez le robot afin qu'il joue une pièce musicale de votre choix en utilisant la commande PlayTone en utilisant un minimum de 10 notes
Si le son de votre ordinateur ne fonctionne pas
Utilisez un robot nxt réel
Branchez le robot nxt réel
Allumez-le
Écrivez votre programme
Enregistrez-le au format .nxc
Compilez-le
EN utilisant nxceditor, téléchargez votre programme compilé dans le robot réel
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true){
}
et des commandes suivantes
PlayTone(200,300);
Wait(300);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom kk.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Titre du défi L(5 points) :
Jouer un son
Programmez le robot afin qu'il joue 2 sons au format .rso de votre choix disponible dans le robot parmi les sons suivants :
! Startup, ! Attention, ! Click, eins, zwei, drei, vier, fuenf, sechs, sieben, acht, neun, null, komma, volt, ohm,ampere
Si vous désirez avoir un plus grand éventail de choix ou que le son de votre ordinateur ne fonctionne pas,
téléchargez l'ensemble des sons au format .rso en tapant dans le terminal :
wget http://ladifference.info/i/images//profPierreMorissette/robotique/nbc/fichiers.rso.zip && unzip ./fichiers.rso.zip && rm ./fichiers.rso.zip && cp ./Sounds/* ./ Choisissez un son de votre choix parmi les fichiers téléchargés dans /home/cb/
Branchez le robot nxt réel
Allumez-le
Téléchargez le fichier son désiré dans le robot en tapant dans le terminal
sudo t2n -put NOM_DU_FICHIER_SON.rso Écrivez votre programme
Enregistrez-le au format .nxc
Compilez-le
EN utilisant nxceditor, téléchargez votre programme compilé dans le robot réel
Attention si vous désirez utiliser d'autres sons de la banque de sons, téléchargez cette banque en tapant dans le terminal :
wget http://ladifference.info/i/images//profPierreMorissette/robotique/nbc/fichiers.rso.zip && unzip ./fichiers.rso.zip && rm ./fichiers.rso.zip && cp ./Sounds/* ./ && sudo cp ./Sounds/* /tmp/nxcEditor/
Voici la liste des sons additionnels que vous pourrez utiliser :
Vous aurez besoin des structures suivantes :
task main()
{
}
et des commandes suivantes
PlayFileEx("Positive.rso",5,false);
Wait(1000);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom ll.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Titre du défi M (5 points) :
Afficher une illustration
Programmez le robot afin qu'il affiche pendant 10 secondes une image au format .ric de votre choix disponible dans le robot parmi les images suivantes :
Herz_klein, Herz_groß
afin que l'image soit entièrement visible dans l'écran du robot
Si vous désirez avoir un plus grand éventail de choix,
téléchargez l'ensemble des sons au format .ric en tapant dans le terminal : wget http://ladifference.info/i/images//profPierreMorissette/robotique/nbc/fichiers.ric.zip && unzip ./fichiers.ric.zip && rm ./fichiers.ric.zip && cp ./Pictures/* ./ Choisissez une image de votre choix parmi les fichiers .ric téléchargés dans /home/cb/
Branchez le robot nxt réel
Allumez-le
Téléchargez l'image désirée dans le robot en tapant dans le terminal
sudo t2n -put NOM_DU_FICHIER_SON.ric Écrivez votre programme
Enregistrez-le au format .nxc
Compilez-le
EN utilisant nxceditor, téléchargez votre programme compilé dans le robot réel
Attention si vous désirez utiliser d'autres images de la banque des images, téléchargez cette banque en tapant dans le terminal :
wget http://ladifference.info/i/images//profPierreMorissette/robotique/nbc/fichiers.ric.zip && unzip ./fichiers.ric.zip && rm ./fichiers.ric.zip && cp ./Pictures/* ./ && sudo cp ./Pictures/* /tmp/nxcEditor/
Voici le liste des images additionnelles que vous pourrez utiliser
Accept 03.ric LEGO Brick.ric Send.ric
Aim.ric LEGO Minifig Head.ric Signal.ric
Angry 01.ric Letter.ric Skeleton 02.ric
Angry 02.ric Light Bulb.ric Sleeping.ric
Angry 04.ric Lightning Cloud.ric Smile 01.ric
Backward.ric Lights 02.ric Smile 02.ric
Battery Electric.ric List.ric Smile 03.ric
Bluetooth.ric Lock Locked.ric Snail.ric
Bomb.ric Lock Unlocked.ric Sound.ric
Boom.ric Looking Left.ric Stop 01.ric
Camera.ric Looking Right.ric Stop 02.ric
Crazy 01.ric Map.ric Stop.ric
Crazy 02.ric Microphone.ric Sun.ric
Dead.ric Mobile.ric Surprise.ric
Decline 03.ric Mountain 02.ric Swearing.ric
Dont Walk 02.ric Note 03.ric Talk 01.ric
Dont Walk.ric NXT.ric Talk 02.ric
Ear.ric PC.ric Temperature C.ric
Earth.ric Point Left.ric Think.ric
Eye Closed.ric Point Right.ric Time 00.ric
Eye Open.ric Point Up.ric Time 01.ric
Eye.ric Power.ric Time 02.ric
Floppy Disks.ric Push Button.ric Time 03.ric
Flower.ric Rabbit.ric Time 04.ric
Follow.ric !.ric Timeglass.ric
Forward.ric Right 02.ric Time.ric
Gasoline.ric Rotation.ric Tired 01.ric
Grey Bulb.ric Run 01.ric Trash Can.ric
Hand.ric Sad 02.ric Two Arrows.ric
Heart 01.ric Sad.ric Walk 02.ric
Heart 02.ric Satellite 03.ric Zzzz.ric
Left 02.ric Search.ric
Vous aurez besoin des structures suivantes :
task main()
{
}
et des commandes suivantes
GraphicOut(25, 20, "Stop.ric");
Wait(1000);
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom mm.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée ll.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi N (5 points) :
Afficher un texte sur l'écran
Programmez le robot afin qu'il affiche un court texte de votre choix sur l'écran du robot en position 10 x LCD_LINE3 pendant 10 secondes pour ensuite effacer l'écran
Vous aurez besoin des structures suivantes :
task main()
{
}
et des commandes suivantes
TextOut(25, LCD_LINE3, "Allo");
Wait(1000);
ClearScreen();
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom nn.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée mm.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi O (5 points) :
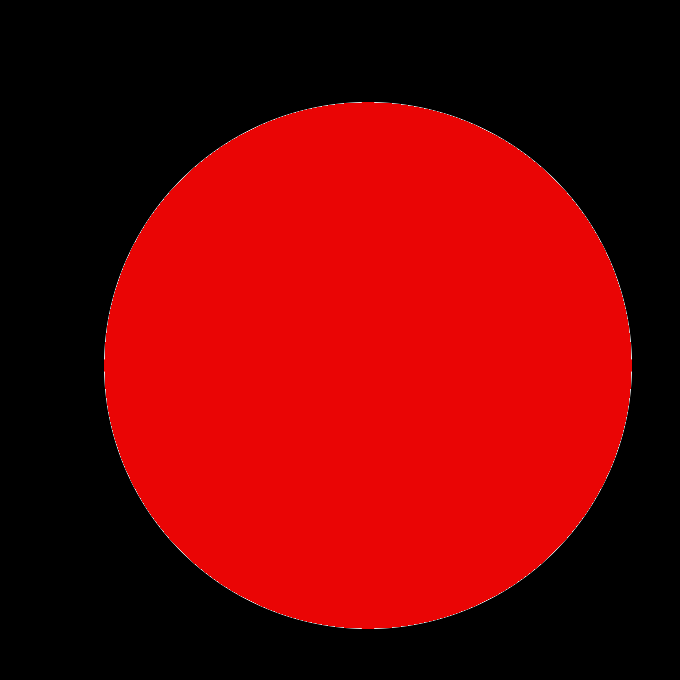
Afficher la valeur du capteur de lumière
Programmez le robot afin qu'il affiche la valeur du capteur de lumière branché dans le port 3 en position 0,LCD_LINE3 lorsque celui-ci est placé sur une couleur rouge pendant 3 secondes pour ensuite effacer l'écran
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true)
{
}
if ( ){
}
else
{
}
et des commandes suivantes :
SetSensorLight(IN_3);
Sensor(IN_3)
NumOut(10,LCD_LINE3,9);
Wait(1000);
ClearScreen();
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom oo.nxc en tapant la touche F3 Créez avec GIMP une image de dimension 680 pixels x 680 pixels contenant un cercle rouge de 300 pixels au centre sur un fond noir ou blanc.
ou utilisez cette image : Exportez cette image sous le nom nn.png
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Réglez l'image en arrière-plan en sélectionnant votre image nn.png en utilisant les menus
BACKGROUND + CREATE BACKGROUND+ Select + Start + OK
et
BACKGROUND + SELECT BACKGROUND
Effectuez une capture-écran-image nommée nnc.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi O (5 points) :
Le chronomètre
Programmez le robot afin qu'il affiche à chaque seconde sur l'écran un chronomètre EN SECONDES et non en millisecondes en utilisant les variables de type int (entier numérique) debut, fin et chrono commandes CurrentTick(); et/ou FirstTick();
Votre programme doit afficher sur la ligne LCD_LINE1 la valeur de départ (variable debut)
Votre programme doit afficher sur la ligne LCD_LINE2 la valeur de fin (variable fin)
Votre programme doit afficher sur la ligne LCD_LINE3 la valeur du chronomètre : variable chrono qui sera le résultat de (fin-debut)/1000
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true)
{
}
et des commandes suivantes :
int i;
CurrentTick();
FirstTick();
NumOut(10,LCD_LINE3,9);
Wait(1000);
ClearScreen();
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom oo.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée oo.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi P (5 points) :
Afficher la valeur du capteur de son
Programmez le robot afin qu'il affiche, à chaque seconde, la valeur du capteur de son branché dans le port 2 en position 0,LCD_LINE3
Vous aurez besoin des structures suivantes :
task main()
{
}
while(true)
{
}
et des commandes suivantes :
SetSensorSound(IN_1);
Sensor(IN_1)
Wait(1000);
ClearScreen();
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom pp.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
en utilisant le menu Sensor + Sensor direct, activez le son à différentes intensités et observez le résultat qui s'affiche à l'écran du robot
Effectuez une capture-écran-image nommée pp.png de votre fenêtre d'exécution
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
La valeur (points) de ce programme pourra varier en fonction de la difficulté de la tâche à réaliser
Enregistrez ce programme dans le répertoire /home/cb/ sous le nom qq.nxc en tapant la touche F3 Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Utilisez au besoin les menus :
Sensor + Sensor direct
BACKGROUND + CREATE BACKGROUND+ Select + Start + OK
et
BACKGROUND + SELECT BACKGROUND
Avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Réalisez et enregistrez un programme simple de votre choix dans le répertoire /home/cb/ sous le nom rr.nxc en tapant la touche F3 Produisez vos images pour l'interface du robot et les roues du robot avec GIMP et exportez au format .png
les dimensions des images doivent être :
Pour l'interface : 67 pixels x 95 pixels (interface.png)
Pour les roues : 26 pixels x 56 pixels (roue.png)
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Votre robot sera enregistré dans le répertoire /home/cb/monrobot
Compactez au format .zip ce répertoire (clic droit sur le répertoire et créer une archive) et téléchargez-le fichier .zip dans votre espace de téléchargement
Effectuez une capture-écran-image nommée pp.png de votre fenêtre d'exécution
Faites fonctionner votre programme et avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Réalisez et enregistrez le programme et l'image en arrière-plan pour réaliser cette tâche dans le répertoire /home/cb/ sous le nom ss.nxc en tapant la touche F3 Produisez votre image d'arrière-plan avec GIMP et exportez au format .png
les dimensions des images doivent être 680 pixels x 680 pixels
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée ss.png de votre fenêtre d'exécution
Faites fonctionner votre programme et avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Réalisez et enregistrez le programme et l'image en arrière-plan pour réaliser cette tâche dans le répertoire /home/cb/ sous le nom tt.nxc en tapant la touche F3 Produisez votre image d'arrière-plan avec GIMP et exportez au format .png
les dimensions des images doivent être 680 pixels x 680 pixels
Sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée tt.png de votre fenêtre d'exécution
Faites fonctionner votre programme et avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Titre du défi U (10 points) :
les maths et la robotique
En utilisant les données suivantes :
Circonférence d'un cercle = 2 x pi x rayon
Il y a 360 degrés dans un cercle
Réalisez le programme qui permettra, en utilisant la commande RotateMotor, de :
faire avancer le robot en ligne droite sur une distance de 25 cm
faire tourner le robot dans un angle de 90 degrés vers la droite
faire avancer le robot en ligne droite sur une distance de 25 cm
faire tourner le robot dans un angle de 120 degrés vers la gauche
faire avancer le robot en ligne droite sur une distance de 25 cm
faire tourner le robot dans un angle de 360 degrés vers la droite
Enregistrez votre programme et sélectionnez le menu nxcSimulator + Save Download and start ou tapez la touche F6
Effectuez une capture-écran-image nommée uu.png de votre fenêtre d'exécution
Faites fonctionner votre programme et avisez l'enseignant qui validera votre travail et qui vous donnera votre CODE DE VALIDATION
Téléchargez cette capture-écran dans votre espace de téléchargement
Dans votre page, ajoutez un titre de niveau 1 contenant le titre de ce défi
Entre les balises <pre></pre> copiez/collez le code de votre programme
Ajoutez ensuite les calculs permettant d'identifier les valeurs des paramètres 3 des commandes RoteteMotor pour chacune des actions suivantes :
faire avancer le robot en ligne droite sur une distance de 25 cm
faire tourner le robot dans un angle de 90 degrés vers la droite
faire tourner le robot dans un angle de 120 degrés vers la gauche
faire tourner le robot dans un angle de 360 degrés vers la droite
Réalisez le défi proposé (construction et programmation du robot )
Effectuez une ou des captures-écran-image selon les directives données
Ajoutez une page à votre portfolio en affichant l'assistant HTML ainsi que la directive 89562
Inscrivez dans le champ titre : NXC-EDITOR
Sélectionnez la section : MODULE ROBOTIQUE_LINUX
Sélectionnez la matière : informatique
Inscrivez dans le champ no de la directive : 89562
Inscrivez dans votre page le titre de niveau 1 : NXC-EDITOR
Indiquez le TITRE COMPLET du défi réalisé
Ajoutez votre/vos capture(s)-écran-image
au besoin
Copiez votre programme NXC
Collez ce programme entre les balises <pre> </pre>
Insérez au besoin votre CODE DE VALIDATION
Si vous avez fabriqué une image, ajoutez cette image dans votre page
Visualisez votre page et apportez des modifications au besoin.



 ou utilisez le menu HELP + SHOW_NXC_COMMANDS de le fenêtre de NXCEDITOR
ou utilisez le menu HELP + SHOW_NXC_COMMANDS de le fenêtre de NXCEDITOR